
 购物车0
购物车0元器件商品{{ gnNumber + hkNumber }}
国内交货{{ gnNumber }}香港交货{{ hkNumber }}
购物车中还没有商品,赶紧选购吧





制造商:ADI/AD
优势和特点
支持的输入数据速率大于2 GSPS
专有低杂散与失真设计SFDR = 82 dBc(直流中频,−9 dBFS)灵活的8通道JESD204B接口
多芯片同步固定延迟数据发生器延迟补偿
可选1x、2x、4x、8x插值滤波器低功耗架构
发射使能功能可进一步省电,实现输出状态的瞬时控制
高性能、低噪声锁相环(PLL)时钟倍频器
数字反sinc滤波器
低功耗: 1.42 W(1.6 GSPS,全部工作条件)
88引脚LFCSP(带裸露焊盘)
产品详情
AD9135是一款双通道、11位、高动态范围数模转换器(DAC),提供2800 MSPS最高采样速率,可以在极宽的带宽内产生多载波。 DAC输出经过优化,可以与ADI公司的ADRF6720和ADRF670x模拟正交调制器(AQM)无缝接口。可选三线式或四线式串行端口接口(SPI)允许对许多内部参数进行编程和回读。 满量程输出电流可以在13.9 mA至27.0 mA典型范围内进行编程。 AD9135提供88引脚LFCSP封装。产品特色
高于2 GHz的超宽复杂信号带宽,支持新兴的宽带和多频带无线应用。
先进的低杂散与失真设计技术,从基带到高中频的宽带信号可以实现高质量合成。
JESD204B子类1支持简化软件和硬件设计中的多芯片同步。
对于具有串行器/解串器(SERDES) JESD204B 8通道接口的数据接口宽度,引脚更少。
可编程发射使能功能实现了功耗与唤醒时间之间的设计平衡。
小型封装,尺寸为12 mm × 12 mm。
应用无线通信3G/4G W-CDMA基站宽带中继器软件定义无线电
宽带通信点对点本地多点分配服务(LMDS),以及多通道多点分配服务(MMDS)
发射分集、多路输入/多路输出(MIMO)
仪器仪表
自动测试设备
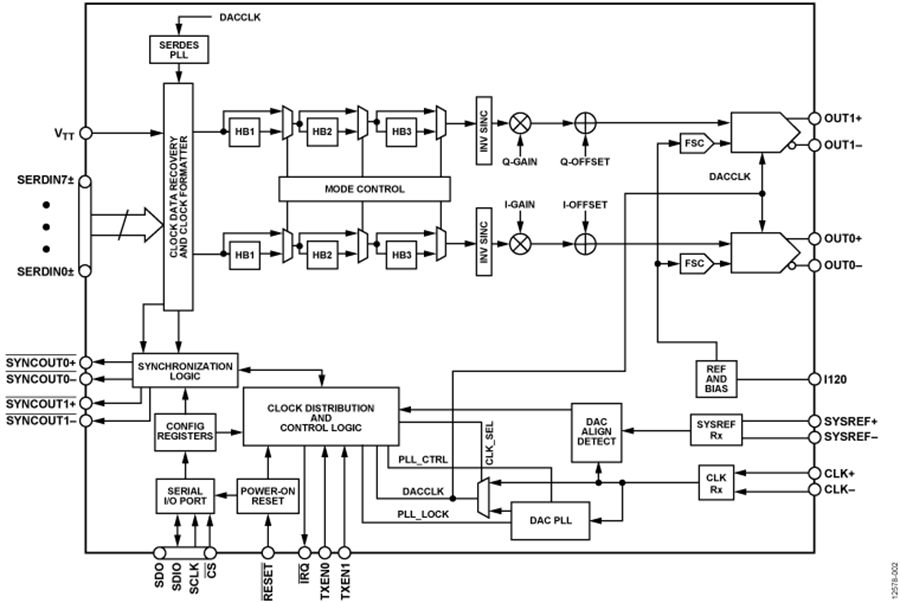
AD9135电路图
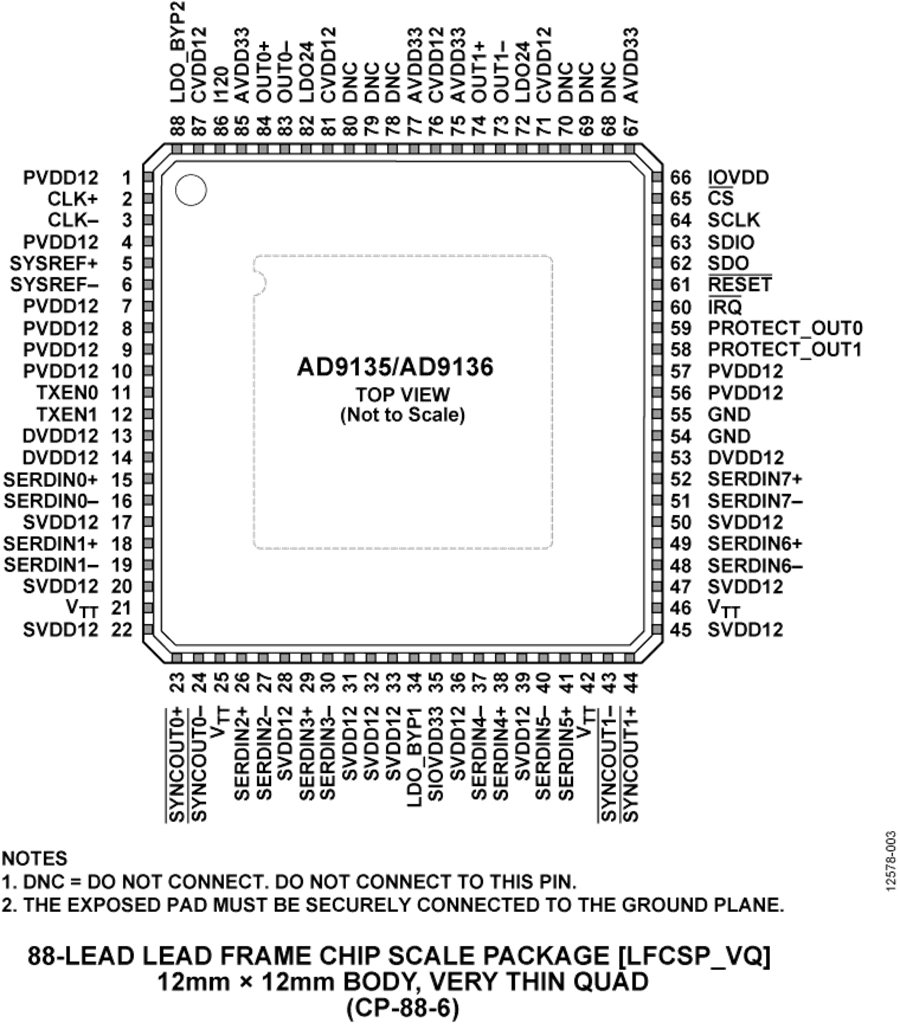
AD9135 引脚图
| 型号 | 制造商 | 描述 | 购买 |
|---|---|---|---|
| AD9135BCPZRL | - | - | 立即购买 |
| AD9135BCPZ | - | - | 立即购买 |
| AD9135BCPAZRL | - | - | 立即购买 |
| AD9135BCPAZ | - | - | 立即购买 |
纯电汽车emc整改:设计缺陷到合规达标的系统方案|深圳南柯电子
STGAP4S具有高集成度、电隔离和诊断功能 意法半导体的SiC MOSFET和IGBT电隔离车规栅极驱动器STGAP4S可以灵活地控制不同额定功率的逆变器,集成可设置的安全保护和丰富的诊断功能,确保电驱系统通过ISO 26262 ASIL D认证 。STGAP4S驱动器集成模数转换器(ADC)和反激式电源控制器,功能丰富,取得了功能安全标准认证,适用于设计可扩展的电动汽车电驱系统。 STGAP4S的设计灵活性归功于输出电路,该电路允许将高压功率级连接到外部MOSFET的推挽式缓冲电路
因为在做3*3卷积的时候,图像大小会变小,具体计算公式如下
skid buffer(pipeline缓冲器)介绍 解决ready/valid两路握手的时序困难,使路径流水线化。 只关心valid时序参考这篇写得很好的博客链接: 握手协议(pvld/prdy或者valid-ready或AXI)中Valid及data打拍技巧 ;只关心ready时序修复可以参考同作者这篇文章链接: (AXI)握手协议(pvld/prdy或者valid-ready)中ready打拍技巧 一个skid buffer是最小的Pipeline FIFO Buffer,只有两个入口。当您需要在发送者和接收者之间为并发和/或定时流水线化路径时,它很有用,但不能
微量液体的输送及控制对生物、化学及医学等领域具有重要的应用价值。
吸盘无线充电器融合磁力与电磁感应,实现无接触高效充电,精度高、安全可靠。
TPS6261x 器件是一款高频同步降压直流/直流转换器,针对电池供电的便携式应用进行了优化。TPS6261x 适用于低功耗 应用,支持高达 350mA 的负载电流,并允许使用低成本片式电感器和电容器。 该器件具有 2.3V 至 5.5V 的宽输入电压范围,支持由锂离子电池供电的应用,具有扩展的电压范围。提供 1.2V 至 2.3V 的不同固定电压输出版本。
在风电、水电等能源设备的传动系统中,电机和传动轴的控制精度直接影响设备效率与安全性。编码器作为关键传感元件,实时监测转速、扭矩及位置参数,为控制系统提供核心数据。然而,工业现场常存在多种协议设备共存的情况,例如编码器多采用PROFIBUS DP接口,而上位机或部分PLC可能支持Modbus RTU协议。如何实现高效、稳定的协议转换,成为保障数据无缝流通的关键。 应用场景与需求分析 在风力发电机或水轮机的传动链中,高速编码器通过PROFIBU
| ADG611 | AD7729 | ADS8902B | AD1851 |
| ADL5812 | AD5439 | ADSP-BF523C | adis16136 |
| ADM6305 | ADP1755 | AD8325 | AD9445 |
| AD8176 | ADG702L | AD8143 | AD7799 |
| AD7265 | AD5336 | AD766 | ADXL316 |
 上传BOM
上传BOM

 工商网监
工商网监